Ve verzi otištěné v časopise RC revue bohužel došlo při tisku k některým chybám. Chybný obrázek, znaména u údajů.
V poslední době se objevily u přijímačů některé nové funkce. Bohužel jim jsou občas přisuzovány takové vlastnosti, které nemají ani nemohou mít. K napsání článku jsem se rozhodl po zveřejnění informací o možnosti provozu dvou modelů na stejném kmitočtu – kanálu.
Běžný RC přijímač se skládá z vlastního přijímače a dekodéru. Každá z těchto částí zásadně ovlivňuje některé z parametrů přijímače.
Přijímací
část
Z hlediska příjmu dvou signálů na stejném kmitočtu je rozhodující chování
přijímací části. Je první v pořadí zpracování signálu a pokud následující
dekodér nedostane nic z požadovaného signálu nemůže sebelepší dekodér
nic vydekódovat. Pouze to, že signál není.
V současné době se při vf přenosu informace většinou používá úzkopásmové
kmitočtové modulace - FM. Chování přijímací části pokud jsou na vstupu
přijímače dva signály shodného kmitočtu ze všeho nejvíce ovlivňuje právě
způsob modulace. Pro FM existuje tzv. „ Pravidlo tří decibelů
“, které říká:
a) rozdíl 3 dB mezi žádaným a rušivým signálem způsobí interferenci
b) rozdíl 3- 6 dB mezi signály se projeví šumem v přenášené informaci
c) rozdíl větší než 6 dB ve vede úplnému potlačení slabšího signálu
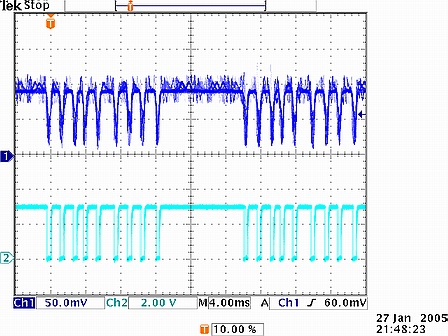
Toto pravidlo jsem se pokusil ověřit měřením. Pro zajištění definovaného poměru signálů na vstupu přijímače nelze v žádném případě použít způsob, kdy se signál do přijímače dostává vzduchem. Vzhledem k mnoha faktorům ovlivňujícím sílu signálu na vstupu přijímače ( okolní prostředí, odrazy, výkon vysílače, držení aj. ) musíme použít jiný postup. Jako zdroje signálu byly použity dva digitální vf generátory s kvalitním výstupním děličem, jejichž výstup je sloučen slučovačem a přiveden na vstup přijímače. Zdvih signálu byl nastaven podle velikosti signálu na demodulátoru přijímače tak , aby byl stejný z generátoru i při příjmu přes anténu z běžného modelářského vysílače. Modulace generátorů byla z použita z kodérů modelářských vysílačů. Aby bylo možno signál dobře rozlišit na osciloskopu, je jeden z kodérů 8 kanálový a jeden 4 kanálový. Signál na výstupu demodulátoru přijímače je modrý a druhý signál ( zelený ) je na výstupu tvarovače tj. na vstupu dekodéru.
Signál
8k je o 3dB větší než 4k signál
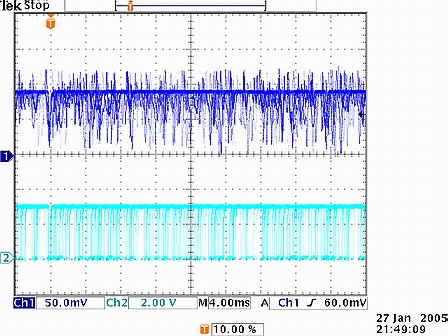
Oba signály
shodné úrovně
Signál 4k je o 3dB větší než 8k
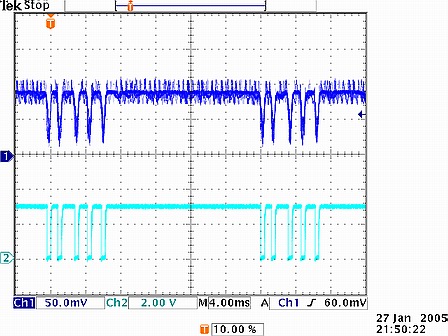
Z obrázků je patrné, že chování přijímače plně odpovídá „ Pravidlu 3dB „. Pokud není užitečný signál minimálně o 3 dB silnější, není příjem možný. Na tento jev nemá velký vliv kvalita přijímače a v určitém rozsahu ani úroveň signálu. Platí to pro všechny běžné druhy kódování signálu PPM, PCM, SPCM, QPCM atd. Pro zajímavost u modulace AM pro stejné potlačení jako u FM potřeba místo 6 dB hodnotu 20 dB.
Dekodér
V posledních letech se začaly pro dekódování signálu používat mikroprocesory.
Proto mohly vzniknout tzv. inteligentní dekodéry. Jejich snahou je docílit
při nezměněném způsobu kódování PPM kvalitnější přenos informace z vysílače
na serva modelu. Kvalitnější zde většinou znamená s menším počtem poruch.
Výsledek je silně závislý na tom, jak kvalitní je program pro dekódování.
Samotné použití mikroprocesoru není ještě zárukou dobré funkce. Měření
přijímačů různých výrobců ukázala, že může být dokonce procesorový dekodér
horší než klasický s posuvným registrem. Jedním z prvních inteligentních
dekodérů byl systém IPD. U nejnovějších přijímačů se setkáme s názvy:
DSP - Digital
Signal Processing
Díky použití mikroprocesoru je možné do určité míry ze signálu odstranit
nepříznivé jevy jako rušení , zákmity a šum. Na základě měření kanálových
impulsů a jejich počtu lze vyhodnocovat vadné rámce, příliš krátké nebo
dlouhé kanálové impulsy, případně při analýze změny hodnot v čase provádět
filtraci. Jak je to konkrétně uděláno, ví většinou jen autor programu.
Každá korekce signálu má však i své negativní stránky, což je v našem
případě doba odezvy a přesnost řízení. Proto je nutné volit nějaký kompromis
mezi stupněm potlačení poruch a zpomalením řízení. Samozřejmě ideální
je, pokud stupeň filtrace se aktuálně mění podle kvality signálu.
Další věcí kterou je nutno si uvědomit je odlišnost chování modelu s
takovýmto přijímačem. Klasický přijímač nás varuje zákmitem - nestabilitou,
že něco není v pořádku. Například, že se blížíme hranici dosahu, nebo
že pohonný motor ruší. U přijímače s velkým potlačením poruch všechny
tyto jevy sice zdánlivě zmizí, ale neznamená to, že je vše v pořádku.
Následky se objeví bez varování v okamžiku, kdy to nejméně čekáme náhlou
ztrátou kontroly nad modelem na delší dobu. Na identifikaci těchto problémů
je potom vhodné, pokud přijímač dokáže zobrazit množství výpadků signálu
– kvalitu příjmu.
TSR - Transmitter
Signature Recognition
Tato funkce je nejvíce zmiňována právě v souvislosti s provozem dvou
modelů na stejném kmitočtu. Spočívá v tom , že dekodér změří charakteristické
znaky svého vysílače ( respektive jen jeho kodéru ) a vytvoří si jeho
„podpis“ , podle kterého si svůj vysílač pozná. Pro rozpoznání lze u
PPM využít tyto parametry:
Počet kanálů
Jde o zcela jasnou informaci - počet vysílaných kanálů kodérem. Tento
počet se nemusí shodovat s počtem ovládaných funkcí. Například pětikanálový
vysílač běžně vysílá 7 kanálů , protože na sedmém je třeba druhé křídélko.
Rozlišení počtu kanálů je bezproblémové a spolehlivé.
Délka rámce
Další parametrem je doba opakování rámce, tj. doba za kterou se opakuje
skupina modulačních pulsů. Ta je většinou pevná, ale jsou i vysílače
a režimy kde je konstantní doba mezery. Tam samozřejmě nelze tuto identifikaci
použít.
Modulační impuls
Jde o vlastní modulační impuls, jejichž časový odstup určuje polohy
kanálů. Šířka při vysílání je konstantní a nepřenáší žádnou informaci.
V přijímači ale šířka může mírně kolísat podle referenční úrovně komparátoru,
který převádí analogový signál z demodulátoru na digitální pro zpracování
v dekodéru. U kanálové informace změna této úrovně nemá vliv, protože
se používá vždy stejná hrana ( většinou sestupná ) signálu. Zde třeba
se zmínit o speciální variantě PPM, kterou používá firma Futaba u vysílačů
s kmitočtovou syntézou. Šířka modulačního impulsu je zde mnohem větší
a bohužel dost přijímačů není schopno s tímto druhem kódování pracovat.
Důvodem pro použití této odlišnosti je snaha o dodržení nulové stejnosměrné
složky signálu a tím symetrie spektra výsledného signálu vysílače. Vzhledem
k nižší čistotě signálu z PLL modulu se zmenší rušení sousedního kanálu.
Co se týká rozlišení
délky rámce a mod. impulsu funkcí TSR je situace složitější. Musí být
stanovena nějaká tolerance, protože jak u vysílače tak u přijímače může
různými vlivy docházet ke změnám těchto parametrů. U vysílače s neprocesorovým
kodérem může délka rámce i mod. impulsu kolísat s teplotou. U přijímače
je to podobné. V zájmu miniaturizace a ceny se většinou používá v přijímači
mikroprocesor pouze s RC oscilátorem a ne krystalem. Stabilita RC oscilátoru
není velká i když je teplotně kompenzována. Je třeba si uvědomit, že
v případě větší změny kmitočtu oscilátoru procesoru může dojít k tomu,
že přijímač nepozná svůj vlastní vysílač a dojde k přerušení řízení.
Je tedy vhodné takovýto přijímač nevystavovat velkým teplotním změnám
mezi okamžikem učení a vlastním provozem.
Naučení přijímače na svůj vysílač může probíhat buď po každém zapnutí
, nebo jen jednou přičemž informace se zapíší do paměti paměti Eeprom
přijímače. Také je vhodné, aby v okamžiku učení měl přijímač kvalitní
signál zcela určitě bez rušení, aby nedošlo k zapsání chybné nebo nepřesné
informace. U přijímačů s učením po každém zapnutí je nutné po zapnutí
ověřit, zda přijímač se naučil správný vysílač !
Dva modely na stejném kanálu
Funkce TSR je právě ta funkce, která se může uplatnit při provozu
dvou modelů na stejném kmitočtu. Bohužel ne tak, jak bylo již několikrát
prezentováno v časopisech. Zjednodušeně lze chování popsat takto:
-
Rušící signál je menší – řízení je možné , rušící signál je potlačen
-
Rušivý i vlastní signál jsou zhruba stejné ( tol. +/-3 dB ) - řízení nemožné , interference signálů
-
Rušivý signál je větší jak vlastní – řízení nemožné, vlastní signál je potlačen rušivým
Z toho vyplývá , že ať je přijímač vybaven funkcí TSR či ne, vždy když úroveň rušícího signálu dosáhne určité úrovně ( viz. Pravidlo 3dB ) dojde ke ztrátě kontroly nad modelem.
Funkce TSR se
může uplatnit pouze v bodě 3. a to následovně: pokud má přijímač TSR
a je splněna podmínka odlišného „podpisu „ vysílačů, zůstanou serva
v poslední poloze nebo v poloze určené funkcí Fail-Safe. V případě,
že přijímač funkci TSR nemá, nebo není splněna podmínka odlišných
„podpisů“ , serva se pohybují podle povelů rušícího vysílače.
Zásadním problémem ovšem je, jak zjistit, kdy je podmínka rozdílnosti
„podpisů“ splněna. S jistotou to bude pouze v případě, že vysílače
mají odlišný počet vysílaných kanálů. U ostatních parametrů to již
není tak jisté, pokud nevíme přesně jaké jsou tolerance hodnot jak
na vysílací tak na přijímací straně. Bohužel žádná z těchto informací
se nikde neuvádí. Málokdo má k dispozici potřebné vybavení a také
příslušné výrobky na testy. V této souvislosti, jsem se setkal dokonce
s tím, že si výrobce nepřál aby jeho výrobek byl testován.
Celkově lze tedy o funkci TSR říci, že není vhodné se ni příliš
spoléhat a věnovat stále velkou pozornost tomu, aby se nevyskytl zapnutý
jiný vysílač na stejné frekvenci jako je naše.
Praktická měření
K měření jsem měl k dispozici dva přijímače vybavené funkcemi TSR a
to MZK - Quatra a Gold receiver SRX-M8.
Quatra je 4 kanálový přijímač domácí produkce, jednoduché směšování,
osazený běžnými obvody 31136 a procesorem PIC16F628. Klasické laděné
obvody přijímač neobsahuje žádné. Učení přijímače na svůj vysílač probíhá
cca. 2 sekundy při každém zapnutí přijímače. Existují i vícekanálové
verze s názvy Sexta a Oktava, doplněné o funkci Fail-safe. V době testů
nebyly ještě dostupné.
SRX-M8 je 8 kanálový přijímač s kmitočtovou syntézou ( bez výměnných
krystalů ), dvojím směšováním. Osazení nebylo možno určit, označení
všech obvodů bylo smazáno a zapojení vývodů neodpovídalo žádnému z běžně
používaných obvodů v přijímačích. Přijímač je ale po hw stránce proveden
velmi pečlivě, důkladné stínění jednotlivých částí, laděné obvody. Přijímač
se pro naučení svého vysílače uvede tlačítkem do speciálního režimu,
kde si sám vyhledá vysílač a změří jeho parametry. Ty si pamatuje i
po vypnutí.
Měl jsem k dispozici pouze jeden kus od každého přijímače a ani na jednom
nelze identifikovat verzi software , kterou obsahuje. Proto je možné,
že následující změřené údaje mohou být u jiných verzí sw odlišné.
U každého přijímače byl měřen rozsah funkcí TSR a DSP. Oba přijímače
samozřejmě spolehlivě rozlišovaly počet kanálů. Rozsah funkce ostatních
parametrů je v následující tabulce:
| Parametr | Výchozí
hodnota |
Quatra |
SRX-M8 |
||
| min. |
max.
|
min.
|
max. |
||
| Kanálový impuls | 1,5
ms |
0,73
ms |
2,3
ms |
0,7
ms |
>
4ms |
| Rámec | 25
ms |
24.2
ms |
25,8
ms |
24
ms |
26
ms |
| Modul. impuls | 0,4
ms |
0.13
ms |
0.52
ms |
- |
- |
Poznámka: Přijímač
SRX-M8 vůbec nereagoval na změnu modulačního impulsu, takže jej nekontroluje.
Dále v krajní mezi rámce zcela chybně dekódoval kanály a vůbec nekontroluje
maximální délku kanálových impulsů.
U přijímače Quatra je potřeba se zmínit o rozsahu kanálového impulsu.
Některé typy vysílačů je možné nastavit mimo tento rozsah hodnot. Je
nutné si uvědomit, že pokud kterýkoliv kanálový impuls je mimo rozsah,
dekodér to vyhodnotí jako chybu a přeruší ovládání všech kanálů ! Je
vhodné tedy ověřit rozsah výchylek ve všech možných režimech, aby nedošlo
k nechtěnému výpadku řízení.
Další zkouškou bylo chování přijímačů se dvěma signály na stejném kmitočtu.
Zde se potvrdily závěry z kapitoly o vstupní části přijímače. Pokud
nemá užitečný signál úroveň minimálně o 3 dB větší než signál rušící,
není příjem - řízení možné.
Pozn. Zanménko -
u hodnoty dB v u násl. měření značí, o kolik dB je rušivý signál je
slabší.
Quatra – úroveň rušícího signálu:
- 3 dB : nefunguje, dioda svítí- 4 dB : vynechává, bliká dioda, bez zákmitů
- 5 dB : funkce bez problémů
- 5 dB : nefunguje
- 6 dB : vynechává , serva silně cukají
- 12 dB : teprve začíná fungovat
Závěr
Cílem měření nebylo zjišťovat, který z přijímačů je lepší, ale ověřit
chování a možnosti přijímačů s novými funkcemi. Nebyla ověřována citlivost,
selektivita a jiné vlastnosti.
Přijímač SRX-M8 přesto, že je velmi dobře obvodově řešen vykazoval dosti
špatné výsledky způsobené nekvalitním software použitým v přijímači.
Je škoda , že výrobce vývoj přijímače ukončil v tomto stavu, protože
s kvalitním software to mohl být výborný přijímač.
Přijímač MZK Quatra prokázal při zkouškách vlastnost silně potlačovat
krátkodobé poruchy. Je to vlastnost určitě vítaná, pokud není na úkor
rychlosti a přesnosti ovládání. Vždy se jedná o nějaký kompromis. Posouzení
chování dekodéru z těchto hledisek bude obsahem jiného článku, kde budou
porovnány různé systémy kódování i různé typy přijímačů. Bohužel zatím
nemám k dispozici všechny potřebné typy souprav na měření.
Problematika RC přijímačů je velmi složitá vyskytuje se tu mnohem více
problémů než třeba u vysílačů. Tento článek měl objasnit princip některých
z nových funkcí přijímačů a upozornit na možné problémy, aby se uživatel
mohl předem vyhnout nepříjemným překvapením.
Miloš Zajíc, Pečky, červen 2005
Článek byl publikován v časopise RC-REVUE č. 8/2005